

In early February, The Washington Post published an op-ed by urbanist writer David Zipper asking the question, “What exactly is the point of self-driving cars?”
While this is an important question, this particular op-ed fails to answer it. The article vacillates from pessimism on the development of automated vehicles to pessimism on future operations, leading to a framing that centers on the worst of all possible worlds. What is missing from the piece is a dose of informed realism on ongoing automated vehicles development, how AV operations might scale in the future to benefit society, and the role of public policy in this debate. Those questions and challenges are the things that automated vehicle developers and policymakers should be looking to answer in the years and decades ahead.
The hype of automated vehicles vs. reality
Zipper is correct that hype surrounding automated vehicles has been rampant in recent years, at least in certain quarters. The 2010s were a period of overpromising and under-delivering from automated vehicle developers and their marketing departments, understandably leading many journalists and politicians to come away with very inaccurate perceptions of AV progress. The media and political class then helped extend these misunderstandings to the broader public.
For example, in 2015, Kevin Roose, now a technology columnist at The New York Times, wrote that conventional human driving on public roads should soon be outlawed entirely because much-safer automated vehicles were allegedly so close to deployment at scale. Roose believed that by 2020 “we could achieve full criminalization of driving, with penalties equivalent to those you’d get for bringing a bazooka to a schoolyard.” He wrote:
By outlawing driving and facilitating a switch to autonomous vehicles, we would make a significant and lasting impact on global public health. Thousands of lives would be saved in the U.S. alone, and those people’s families would be spared unthinkable tragedy. (We would also make cities like Los Angeles and New York eminently more livable by dramatically reducing traffic, but that’s another argument.)
Congress wouldn’t need the driving ban to kick in immediately. Like the Affordable Care Act or the Dodd-Frank Act, the No More Driving Act could be phased in over a period of several years, to allow car makers to perfect their technology and achieve mass production. Perhaps in 2017, companies that produce self-driving cars could receive a tax credit, and consumers could be paid to trade in their old, human-driven cars under a “cash for clunkers”-type scheme. Low-income families may require subsidies to make the switch. In 2018, drivers would begin to receive small fines for driving on public roads. In 2019, the punishment could become more severe—perhaps $500 citations for traveling in a human-directed vehicle. And in 2020, we could achieve full criminalization of driving, with penalties equivalent to those you’d get for bringing a bazooka to a schoolyard.
Similarly, in 2012, a decade ago, Mary Cheh, chair of the Council of the District of Columbia’s transportation committee, introduced legislation to impose mileage-based user fees on automated vehicles because she believed they would soon be ubiquitous and electric, thereby blowing a large hole in D.C.’s fuel tax coffers.
Not to pick on them, Roose and Cheh are just two of many, many people who got things very wrong on the timing of automated vehicles (and Cheh’s search for a viable fuel tax alternative happened to be forward-thinking and a good policy in a non-AV context), and one can see how their inferences are logically consistent with the way many at the time were implying automated vehicles would progress.
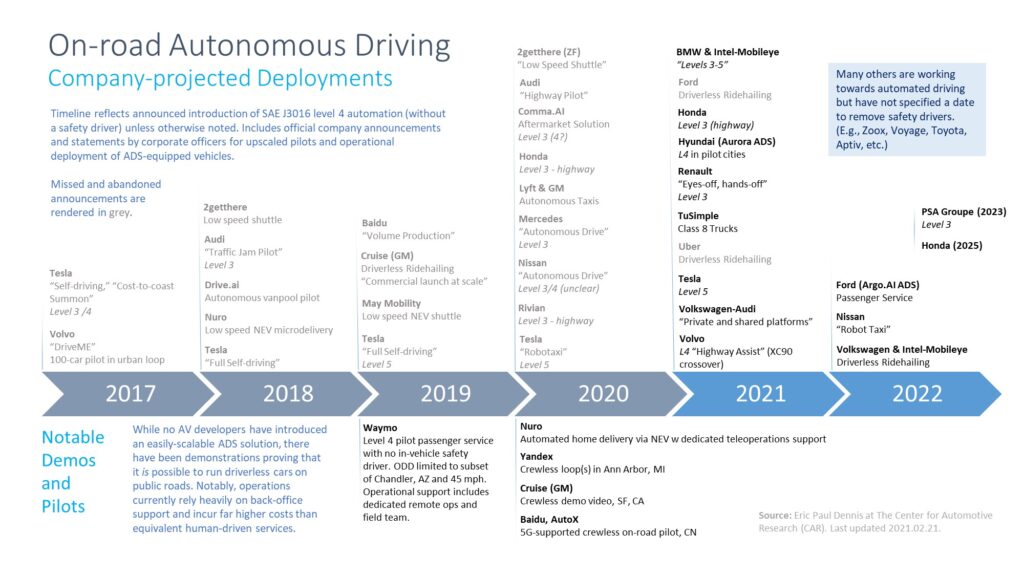
Eric Paul Dennis, an engineer and policy analyst formerly with the Center for Automotive Research, tracked the often outlandish AV deployment promises from developer CEOs and company press releases and compiled them into a graphical timeline of broken dreams that is worth reviewing.
While companies and their marketing-driven hype pushed overly optimistic claims and timelines for self-driving cars, there were other more sober expert voices and opinions on automated vehicle deployments, which garnered far less public and political attention. For example, at the 2014 Automated Vehicle Summit of the Transportation Research Board of the National Academies (the world’s premier AV research conference), expert attendees were surveyed on forecasted deployment years for various levels of automation in various use cases. While company press releases and media coverage may have given consumers the idea that deployment was imminent, for the fully automated self-driving taxis that Zipper focuses on in his Washington Post op-ed, the median forecasted deployment year was 2030.
This survey of experts occurred while the automated vehicles hype cycle was nearing its peak. The median forecasted deployment year among AV experts is still eight years in the future and investors continue to place multi-billion-dollar bets on these technologies, so if one’s expectations match those of the experts and investors with skin in the game, there is still no reason for disappointment.
If Zipper and others had merely sought out the views of experts at the time, their current disillusionment with AV progress could likely have been avoided.
The safety case
Zipper points out that the National Highway Traffic Safety Administration (NHTSA) estimated in 2015 that “[t]he critical reason [for the crash] was assigned to the driver in an estimated 94 percent (±2.2%) of the crashes.” He argues that “NHTSA’s nuanced finding was often boiled down to ’94 percent of crashes are caused by human error’” and that “AV companies placed that 94 percent figure at the center of their marketing pitches.” Zipper last year wrote an article in The Atlantic calling this the “dangerous 94 percent myth.”
However, Zipper ignores decades of research by NHTSA and others that goes far beyond the two-page 2015 memo he singles out as the source of this claim. For instance, a 1977 NHTSA-commissioned study found that “conservatively stated, the study indicates human errors and deficiencies were a cause in at least 64% of accidents, and were probably causes in about 90-93% of accidents investigated” and further “that human factors were possibly a cause in up to 97.9% of accidents.”
The source of the 2015 claim was NHTSA’s 2008 report to Congress on the National Motor Vehicle Crash Causation Survey, which provided summary weighted crash frequency data indicating that of a total of 2,189,166 crashes, 2,041,943 involved critical pre-crash events attributed to drivers—or 93.3%. Importantly, driver error goes well beyond legally prohibited misbehavior such as driving while intoxicated or texting while driving. NHTSA’s Fatality Analysis Reporting System reveals that “lost in thought” is a major critical factor in distraction-affected crashes, so add daydreaming to the list of normal human driver behaviors that AVs will not engage in.
While it is indeed an oversimplification to solely blame driver error for 94% of crashes, the fact remains that decades of statistical analyses of crash data have consistently found human factors are critical factors in the vast majority of crashes. This fact was reaffirmed in January by the U.S. Department of Transportation’s National Roadway Safety Strategy, which stated, “The overwhelming majority of serious and fatal crashes include at least one human behavioral issue as a contributing factor.”
In his Atlantic article, Zipper minimizes this fact by arguing that many driver errors can actually be attributed to non-driver factors. His example: “The foggy weather obscured the driver’s vision; flawed traffic engineering failed to compel him to slow down as he approached the intersection; the SUV’s weight made the force of the impact much greater than a sedan’s would have been.”
But the example ultimately fails to absolve the driver because the driver failed to take reasonable care by driving 15 miles over the posted speed limit in adverse weather conditions—and would likely be liable for the crash in some form. To what degree would be a case-specific finding. This ambiguity gets at the real reason why NHTSA generally avoids blame language in its crash risk research: liability is complex and legally determined.
So, what is the crash-reduction potential of automated vehicles?
This is difficult to confidently answer with precision and, as Zipper notes, AVs might generate new types of crashes. But it is safe to assume that if AVs are deployed at scale, they will crash less and less severely than conventional vehicles or they will eventually be driven from the market by regulators and trial lawyers. The Insurance Institute for Highway Safety (IIHS) published research in 2020 suggesting strong AV crash-reduction potential. Since AVs are anticipated to be designed to follow traffic laws (despite Zipper’s reliance on a single recent Tesla misdeed to dispute this), the IIHS study’s general methodology coupled with reasonable assumptions supports a conservative estimate of AV crash-reduction potential in excess of 70%.
The economic case
Zipper largely fails to present the obvious economic arguments in favor of automated driving. The discussion of freight is relegated to a single parenthetical sentence, where he concedes “self-driving trucks on highways may be more viable than self-driving cars in cities.”
This subject deserves more contemplation. The Census Bureau’s 2017 Commodity Flow Survey estimates that trucks move $11.4 trillion worth of freight every year in the U.S. and the American Transportation Research Institute estimates that driver wages and benefits accounted for 44% of trucking costs in 2020, so it is no surprise that automated vehicles have generated intense interest in the logistics industry.
The potential impact on passenger transportation is also large. Research published in 2018 by a team of Swiss academics suggests automated driving systems have the potential to reduce taxicab operating costs by 85% in urban settings and 83% in suburban and exurban settings. In this forecast, automated taxi service costs on a passenger-mile basis would fall below the present costs of providing rail and bus transit and shared automated taxis are projected to be cheaper even than automated buses.
Automated vehicles also have the potential to significantly reduce traffic congestion through coordination with other AVs. Brookings Institution economist Clifford Winston and lawyer Quentin Karpilow modeled the economic impacts of congestion reduction in a scenario of widespread AV adoption in their 2020 book, Autonomous Vehicles: The Road to Economic Growth? They estimate that a large reduction in travel delays from AVs could raise the annual economic growth rate of the U.S. by at least one percentage point. While this might seem small, a conservative estimate would still translate to hundreds of billions of dollars in additional annual growth for the economy.
Winston and Karpilow also suggest that AVs could generate substantial private and social benefits by “improving traffic safety, health, accessibility, land use, employment, the efficiency of the U.S. transportation, and public finance.” They conclude that public policy should be reformed to remove barriers to AV development and deployment, and warn that the “failure to do so would significantly reduce the benefits of a major technological advance and could result in billion—if not trillion—dollars bills being left on the sidewalk.”
The mobility case
Zipper dismisses the appeal of automated vehicles in urban areas for those who are vision- or mobility-impaired by arguing that “in cities and suburbs, people can already call a taxi or hail an Uber.” What he ignores, as was discussed in the previous section, is the potential for taxi-style AV service costs to decline so dramatically so as to be cheaper to operate per passenger-mile than conventional alternatives. This will allow more people to take more trips to satisfy their personal preferences, whatever they may be.
This is especially important because in the United States lack of access to automobiles and transit dependence greatly limits employment and social opportunities, perpetuating poverty and other inequities. The University of Minnesota’s Access Across America series shows that in 2019, those residing in the 50 largest U.S. metro areas could, on average, access 47% of metro area jobs by automobile in 30 minutes of travel (or one hour of bidirectional daily commuting).
In contrast, just 8% of jobs were accessible by transit in 60 minutes (or two hours of bidirectional daily commuting). Even in the New York City metro area, by far the most transit-oriented American metro area and where more than 40% of total U.S. transit trips take place, drivers can access 13% of New York metro area jobs in 30 minutes versus just 14% of jobs in 60 minutes by transit. In nearly all of the U.S. for almost every possible origin-destination pair, mass transit is a much worse option than travel by car.
The 2017 National Household Travel Survey revealed low-income households are also generally transportation-poor households. Rather than seeking to limit their vehicle-miles of travel (VMT) and person trips, equity-focused public policy should support an increase in their VMT and daily trips. Automated vehicles have the potential to expand the large benefits of automobility to underserved populations without the large costs associated with private car ownership and the physical and cognitive abilities required of drivers.
Public policy challenges
Due to the sharp reduction in per-mile driving costs, one would also expect some increase in VMT. These additional VMT will generate large private benefits to travelers who could better satisfy their personal preferences, but may also generate social costs such as increased traffic congestion. Zipper worries that “[w]ithout some sort of restrictive policy like a vehicle-miles-traveled tax or decongestion [sic] pricing, overwhelmed streets could become mired in gridlock.”
A recent review of three dozen international AV modeling studies suggests that AVs might reduce VMT by as much as 29% or increase VMT by as much as 89%. Zipper is referring to what is colloquially known as the “hell scenario” in the world of AV modeling, in which large increases in VMT are coupled with no congestion mitigations in order to create nightmarish levels of gridlock.
Fortunately, the “hell scenario” that Zipper fears is implausible. In the real world, people are quite capable of adapting and assuming zero adaptive behavior in response to rising congestion is unrealistic, even if some cannot adjust their schedules or routes to avoid congestion. Adaptive behaviors include personal user behavior, such as avoiding certain areas at certain times of day known to be congested, as well as infrastructure owner-operator behavior, such as implementing congestion pricing. And if taxi-style AVs become a dominant urban travel business model, Winston and Karpilow suggest in their book that:
“…congestion pricing may become less politically objectionable, because ride-sharing travelers will be accustomed to paying a charge per use. Riders do so today, with Uber and Lyft, and the price of those services often includes additional fees (for example, surge charges or tolls) as part of the full price.”
The appropriate response to possible VMT and congestion challenges should come from infrastructure owner-operators directly managing traffic flows, not technology developers or vehicle manufacturers who at best could have a small indirect impact on traffic flow (such as through the deployment of synchronized connected and cooperative automation technology). Congestion pricing solves this problem by ensuring those who enjoy the private benefits of travel are also internalizing social costs associated with their travel.
But much more important than congestion hypotheticals are policy considerations related to near-term development and deployment. Zipper mentions Federal Motor Vehicle Safety Standard (FMVSS) exemptions, but fails to explain the two reasons why modernizing the FMVSS exemption regime is so important for emerging AV technologies. The more obvious of the two reasons is that absent an FMVSS overhaul to fully incorporate AVs in the federal auto safety regulatory ecosystem, the current limit of 2,500 exempt noncompliant vehicles per year over two years (with a potential two-year renewal) effectively prohibits the deployment of light-duty AVs with novel designs at scale.
But the other reason is arguably even more important. Because proposed FMVSS exemption reforms would still require AV developers to demonstrate that their non-compliant vehicles achieve an equivalent level of safety or better as conventional FMVSS-compliant vehicles the data and analysis supporting exemption applications would be extremely valuable to regulators as they attempt to modernize the FMVSS regime for AVs in the coming years. A recent RAND Corporation study found that the traditional analytical tools and metrics used by safety regulators are generally not suitable for emerging AV technologies. Thus, new ones will need to be developed and the FMVSS exemption process is perhaps the best way for regulators to gain insight into the various safety cases being made by AV developers.
Before demanding “convincing answer[s]” from AV developers, as Zipper suggests, we ought to appreciate that in many domains there are none. We will be dealing with a large amount of uncertainty about both AV technology and policy for some time. It is also important to keep in mind that excessive risk-aversion to AV errors generates another form of risk: if AVs do in fact reduce crash risk, even if they are not flawless, any restriction or delay caused by over-cautious public policy translates to more property damage, injuries, and deaths than would otherwise have been the case.
Making the perfect AV the enemy of the good AV would be a deadly mistake and this dangerous precautionary approach should be forcefully rejected by state and federal officials. As Aaron Wildavsky, the late political scientist who made pioneering contributions to risk management, concluded in his 1988 book Searching for Safety, “Safety results from a process of discovery. Attempting to short-circuit this competitive, evolutionary, trial and error process by wishing the end—safety—without providing the means—decentralized search—is bound to be self-defeating.”
For more discussion on these topics, see Reason Foundation’s reports on near-term AV policy recommendations for the federal and state levels.